Go to the source code of this file.
|
| const TsKeyFrame * | Ts_GetClosestKeyFrame (const TsKeyFrameMap &keyframes, const TsTime targetTime) |
| | Finds the keyframe in keyframes closest to the given time. Returns NULL if there are no keyframes. More...
|
| |
| const TsKeyFrame * | Ts_GetClosestKeyFrameBefore (const TsKeyFrameMap &keyframes, const TsTime targetTime) |
| | Finds the closest keyframe in keyframes before the given time. Returns NULL if no such keyframe exists. More...
|
| |
| const TsKeyFrame * | Ts_GetClosestKeyFrameAfter (const TsKeyFrameMap &keyframes, const TsTime targetTime) |
| | Finds the closest keyframe in keyframes after the given time. Returns NULL if no such keyframe exists. More...
|
| |
std::pair< const TsKeyFrame
*, const TsKeyFrame * > | Ts_GetClosestKeyFramesSurrounding (const TsKeyFrameMap &keyframes, const TsTime targetTime) |
| | Equivalant to calling Ts_GetClosestKeyFrameBefore and Ts_GetClosestKeyFrameAfter, but twice the speed; for performance critical applications. More...
|
| |
| bool | Ts_IsSegmentFlat (const TsKeyFrame &kf1, const TsKeyFrame &kf2) |
| | Returns true if the segment between the given (adjacent) key frames is flat. More...
|
| |
| bool | Ts_IsKeyFrameRedundant (const TsKeyFrameMap &keyframes, const TsKeyFrame &keyFrame, const TsLoopParams &loopParams=TsLoopParams(), const VtValue &defaultValue=VtValue()) |
| | Returns true if the given key frame is redundant. More...
|
| |
| TS_API Ts_Data * | Ts_GetKeyFrameData (TsKeyFrame &kf) |
| |
| TS_API Ts_Data const * | Ts_GetKeyFrameData (TsKeyFrame const &kf) |
| |
| bool | Ts_IsClose (const VtValue &v0, const VtValue &v1) |
| |
Finds the keyframe in keyframes closest to the given time. Returns NULL if there are no keyframes.
Finds the closest keyframe in keyframes after the given time. Returns NULL if no such keyframe exists.
Finds the closest keyframe in keyframes before the given time. Returns NULL if no such keyframe exists.
Equivalant to calling Ts_GetClosestKeyFrameBefore and Ts_GetClosestKeyFrameAfter, but twice the speed; for performance critical applications.
Returns true if the given key frame is redundant.
Returns true if the segment between the given (adjacent) key frames is flat.

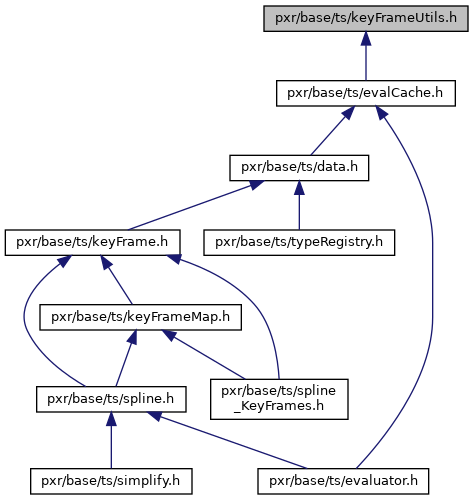
 Include dependency graph for keyFrameUtils.h:
Include dependency graph for keyFrameUtils.h: 1.8.6
1.8.6