

I'm miserably failing at rigging a very simple thing, I really need some help please.
I say miserably 'cause it's something that would have taken me 5min 15 years ago in another DCC

I'm trying to rig an very basic hexapod. So just a body and 6 legs with IK controls.
Each leg is only 3 bones :
- shoulder only rotate on y axis
- upper leg only rotate on x
- lower leg only rotate on x
I've searched a lot on the web and every single example I can find is the easy way of a ball joint at the shoulder.
But when you want something mechanically "real" (no ball joint) then there's little to no info available.
Tried to fine tune limit/constraint an ikchain with APEX, couldn't figure it out.
Then I tried with kinefx, same thing.
Then I've tried to cut the problem, since I can't find any info on how to limit/constraint an IK chain, by using a lookat on the shoulder, pointing to the IK tip target, but I can't get it to work with a moving body.
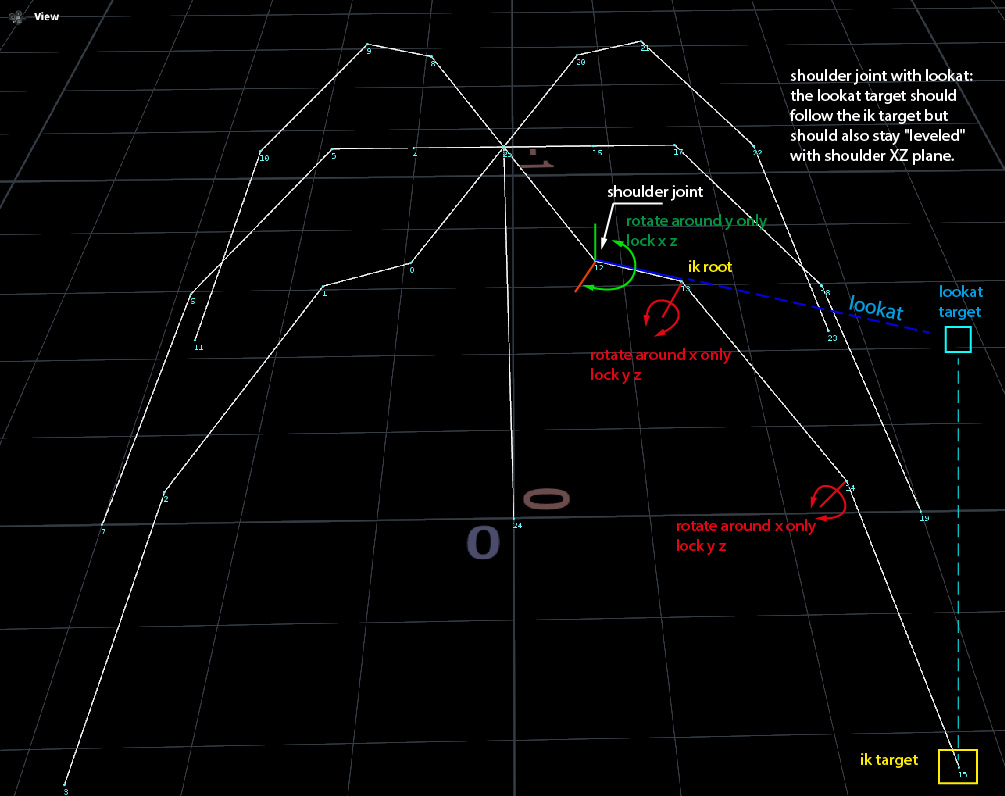
I'm almost there, but my problem now is that I'm able to make a lookup pointing to the ik target, I replace the Y position of the target with the shoulder Y value in a rigattributeVop, but it's not enough, when I rotate the body it's not working because I should point to the target projected on a plane (XZ plane of the shoulder bone) and not just replace the Y value.
I'm failing at making the rigvop network that would "project" the target position into the right plane.
I'm also wondering if there isn't a way more straight forward approch to rig this.
If I could lock rotation on the joints of the IKchain, I wouldn't even need the lookat !
There's a node called ConfigureJointLimit ! But it's not doing anything to the IKchain 😦 Seems to be for ragdolls and fullbodyIK.
Not sure if I'm clear enough to describe my issue :/
I'm attaching a hip file of where I'm at now.
Thanks in advance, any help would be much much appreciated, or just pointing my to some related resources..
Image Not Found



