| On this page |
RBD Car Rig ¶
-
New
 RBD Car Rig SOP that converts oriented car geometry into a driveable dynamic car rig with constraints for the suspension and motors. It is adaptable to any input geometry, and has 4 built-in wheel layouts (with a 5th option to customize the wheel layout entirely). The wheel and suspension properties can be set globally, per axle, or on individual wheels. You also have the ability to tune wheel camber, tire friction and bounciness, suspension travel, stiffness, and damping.
RBD Car Rig SOP that converts oriented car geometry into a driveable dynamic car rig with constraints for the suspension and motors. It is adaptable to any input geometry, and has 4 built-in wheel layouts (with a 5th option to customize the wheel layout entirely). The wheel and suspension properties can be set globally, per axle, or on individual wheels. You also have the ability to tune wheel camber, tire friction and bounciness, suspension travel, stiffness, and damping.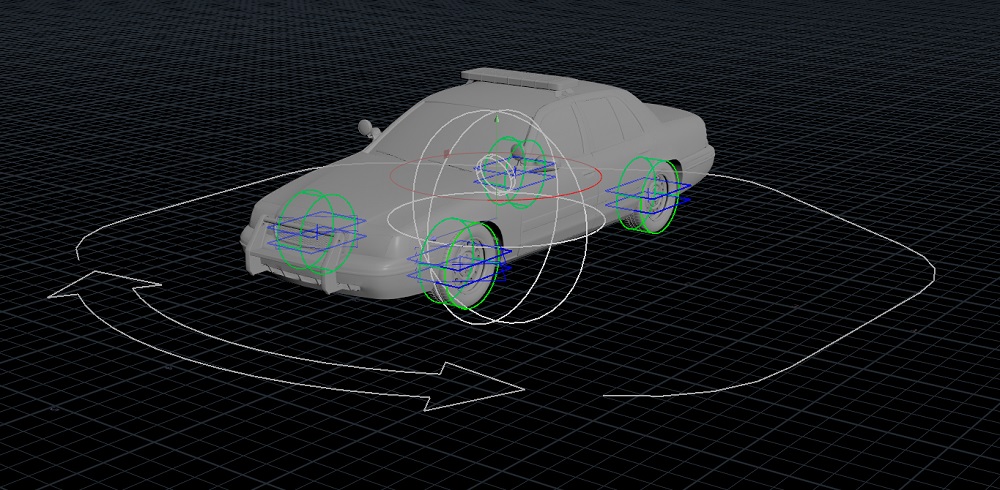
-
New
RBD Car Follow Path SOP lets you animate a RBD Car Rig along a path. It constrains and aligns an RBD Car Rig along a path while adjusting the constraint geometry’s attributes to match its intended steering and speed. It can optionally stick the vehicle to a collision ground, turn and spin the wheels, adjust the wheels and chassis to compensate for the suspensions, add drift and overshoot, while allowing for manual adjustments to be made. -
New
 RBD Car Deform SOP that deforms high-res car geometry after simulating the proxy car geometry. This can be used to add details such as tire compression against the ground geometry, deforming suspension components, and controlling which geometry inside the tires should be rotated.
RBD Car Deform SOP that deforms high-res car geometry after simulating the proxy car geometry. This can be used to add details such as tire compression against the ground geometry, deforming suspension components, and controlling which geometry inside the tires should be rotated.
RBD Destruction LOP ¶
-
New
 Houdini Procedural: RBD LOP which transforms high-resolution geometry at render time based on a point cloud, similar to the Transform Pieces SOP. This can be used to efficiently cache and render large RBD simulations in USD. This is also part of the RBD Destruction LOP, but can be used separately for custom setups
Houdini Procedural: RBD LOP which transforms high-resolution geometry at render time based on a point cloud, similar to the Transform Pieces SOP. This can be used to efficiently cache and render large RBD simulations in USD. This is also part of the RBD Destruction LOP, but can be used separately for custom setups -
Significant performance improvements to the
 RBD Destruction LOP when the procedural is applied to many USD primitives.
RBD Destruction LOP when the procedural is applied to many USD primitives. -
New Mode parameter on the
RBD Destruction LOP which can be used to perform only fracturing or only simulation. This can be used to cache the fractured geometry to USD before performing a simulation separately later on.
Other improvements ¶
-
Minor fixes and improvements to collision behavior between objects with convex collision shapes.
-
Bullet library updated to version 3.25.
-
When Match by Attribute is enabled on a
 constraint network, the Bullet solver now only interpolates anchor positions for constraints with a valid
constraint network, the Bullet solver now only interpolates anchor positions for constraints with a valid (>= 0)id value. Previously, constraints that didn’t have an id assigned (e.g. at a default value of-1) could unexpectedly interpolate anchor positions from a different primitive with the same id.