| On this page | |
| Since | 20.0 |
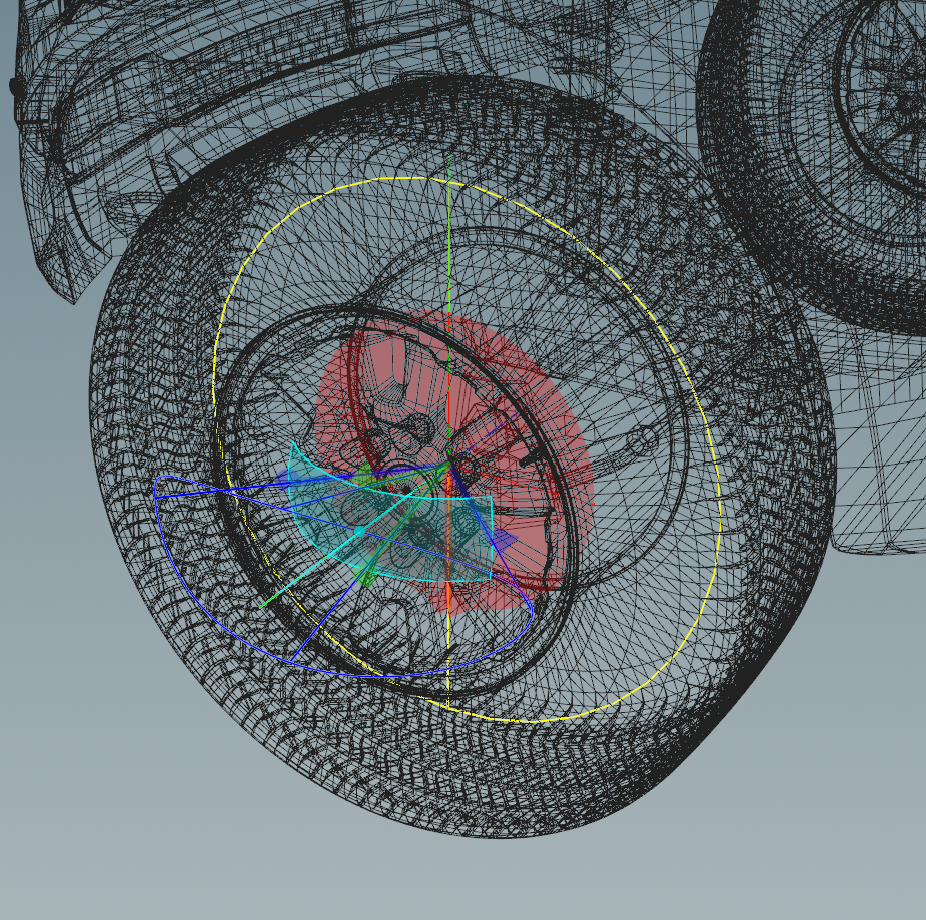
このSOPは、入力の拘束ジオメトリ上に、Bulletの![]() Cone Twist拘束を表現したアトリビュートを作成します。
Cone Twist拘束を表現したアトリビュートを作成します。
ノード自体のグローバルパラメータを直接編集( Edit Parms を有効)、または、拘束のアトリビュートを個別に編集( Edit Parms を無効)のどちらかによって、ビューポート内でインタラクティブに拘束を編集することができます。
アクションを使用すると個別の編集も作成されるので、その結果、選択した拘束のアトリビュートはパラメトリックに設定した値ともはや一致しなくなります。 例えば、編集した拘束をコピーアンドペーストしたり、選択した拘束を拘束ジオメトリに揃えたり、モーターをオン/オフしたりなどです。
個別の編集は、ノードのパラメータを介してグローバルに設定された拘束アトリビュートよりも優先されます。 編集した拘束がノードのパラメータによって再び駆動されるようにするには、すべての編集を一括でクリアするか、または、個々の拘束をリセットすることで可能です。
詳細は、拘束を参照してください。
パラメータ ¶
Constraint Group
拘束アトリビュートが編集される拘束ジオメトリ内のプリミティブ。
Filter by Pieces
拘束されるRBDジオメトリ上のアトリビュートに基づいて動的に作成されたグループによって、拘束プリミティブを制限します。
Groups
All to Group
Group 1 に属しているRBDジオメトリにアンカーポイントが取り付けられている拘束プリミティブすべて。
Group to Group
Group 1 に属しているRBDジオメトリにアンカーポイントが取り付けられていて、且つ、 Group 2 に属しているRBDジオメトリに他のアンカーポイントが取り付けれている拘束プリミティブ。
Group 1
アンカーポイントを取り付ける必要があるRBDジオメトリグループ。
Group 2
Group to Group が選択されている時に、他のアンカーポイントを取り付ける必要があるRBDジオメトリグループ。
Color
視覚的に識別できるように、拘束プリミティブに色を追加します。
Clear Edits
個別の拘束編集すべてをクリアして、それらがパラメトリックに駆動されるようにします。
Import Edits
選択した入力拘束ジオメトリからCone Twist拘束アトリビュートをコピーして、選択した拘束に対してそれらのアトリビュートを個別の編集として適用します。
Update Parms
選択した入力拘束ジオメトリからCone Twist拘束アトリビュートをコピーして、状況に応じてノードのパラメータを設定します。
Guide Scale
ガイドジオメトリのウィジェットのスケール。
Lock Axis
拘束の回転制限をインタラクティブに編集する時、軸をロックすると、拘束の向きを変更せずに回転制限値のみが影響を受けるようになります。 これを無効にすると、同時に片側の拘束の回転制限を編集することができ、拘束の軸がそれに応じて向きが変わるので、もう片側はその場でロックされたままになります。
Edit Parms
これが有効な時、拘束をインタラクティブに編集すると、ノードパラメータが更新され、編集されていない拘束がグローバルで影響を受けます。 これを無効にすると、すべての拘束の編集が個別の編集として保存されるので、グローバルにパラメトリックに設定されたアトリビュートが上書きされます。
Constraint Name
DOPネットワークで使用する拘束データ(例えば、![]() Cone Twist Constraint Relationship)の Data Name を指定します。
Cone Twist Constraint Relationship)の Data Name を指定します。
Enable Soft Constraint
有効にすると、位置制限、回転制限、モーターターゲットは、個別の Stiffness と Damping Ratio のパラメータを持ったソフト拘束として扱われます。 これは、主にアニメーションする Target Rotation または Target Position にバネのような挙動で追従(例えば、ターゲットアニメーションを使ったラグドール)させるのに役立ちますが、 Stiffness を下げることで位置制限または回転制限をもっとソフトな境界として動作させることもできます。
Max Twist
最大捻じり(単位は度)。
Max Out Rotation
左右方向の最大回転(単位は度)。
Max Up Rotation
上下方向の最大回転(単位は度)。
Softness
角度が Softness * Maximum Angle より大きくなった時、その拘束が影響を持ち始めます。 Softness の値を低くすると、拘束境界が柔らかくなります。
Allow Initial Violation of Limits
初期段階で回転制限が違反していた場合は、その制限を実行せずに、その回転を維持するようにします。 これによって、シミュレーションの初めに突然動くのではなく、その回転制限内でオブジェクトが自然に戻るようにさせることができます。
Constraint Force Mixing
この値を上げれば、拘束がより柔らかくなり、シミュレーションの安定性を良くすることができます。 拘束の角度コンポーネントは、拘束の再構築に必要なフォースとこのパラメータを乗算した値に比例して、不安定になる場合があります。
Bias Factor
拘束が向きの誤差を訂正する割合。 1の値は、必ず常に拘束に従います。このバイアスは0.2から0.5の間にするのを推奨します。
Relaxation Factor
角速度が拘束によって変えられる割合。 低い値は、拘束がVelocityをゆっくりと変更することを意味し、境界がより柔らかくなります。
Angular Limit Stiffness
回転制限を強制しようとするフォースの強さを指定します。 この値は、バネの周波数に相当します。
Angular Limit Damping Ratio
回転制限を強制する時にモーションに適用される減衰量を指定します。 この値は、バネの減衰率に相当します。 0の値は、減衰なしが指定され、1の値は、振動しないほど十分な減衰量が指定されます。 0から1の間の値は、(ある程度の減衰がある)振動が許容され、1より大きい値は、振動しないようにモーションが大幅に減衰します。
Twist Translation Range
Goal Twist Axis 方向に拘束されたオブジェクトの最小/最大移動量を指定します。
Out Translation Range
Goal Out Axis 方向に拘束されたオブジェクトの最小/最大移動量を指定します。
Up Translation Range
Goal Up Axis 方向に拘束されたオブジェクトの最小/最大移動量を指定します。
Position CFM
この値を上げれば、拘束がより柔らかくなり、シミュレーションの安定性を良くすることができます。 拘束の位置コンポーネントは、拘束の再構築に必要なフォースとこのパラメータを乗算した値に比例して、不安定になる場合があります。
Position ERP
次のシミュレーションステップで訂正される位置誤差の割合を指定します。 ほとんどのシミュレーションでは、0.1から0.8の間にするのを推奨します。
Position Limit Stiffness
位置制限を強制しようとするフォースの強さを指定します。 この値は、バネの周波数に相当します。
Position Limit Damping Ratio
位置制限を強制する時にモーションに適用される減衰量を指定します。 この値は、バネの減衰率に相当します。 0の値は、減衰なしが指定され、1の値は、振動しないほど十分な減衰量が指定されます。 0から1の間の値は、(ある程度の減衰がある)振動が許容され、1より大きい値は、振動しないようにモーションが大幅に減衰します。
Goal Twist Axis
円錐のゴール方向。デフォルトはX軸です。
Goal Up Axis
Up軸のゴール方向。デフォルトはY軸です。 これは、Twist軸に垂直にしてください。Out軸は、Twist軸とUp軸の外積で計算されます。
Constrained Twist Axis
拘束されるオブジェクトの初期のTwist軸。
Constrained Up Axis
拘束されるオブジェクトの初期のUp軸。これは、Twist軸に垂直にしてください。
Enable Motor
有効にすると、この拘束は、拘束するオブジェクトがさらに回転制限内でターゲットの向きと位置に従うように試みます。
Target Current Pose
Motor Target が現在の向きに設定されます。 これを使用することで、拘束するオブジェクトに剛性が加わって、相対的な向きの変化に抵抗させることができます。
Target Rotation
モーターが達成しようする(ゴールアンカーを基準とした)ターゲットの向きを指定します。
Target Position
モーターが達成しようとする(ゴールアンカーの空間における)ターゲット位置を指定します。 この位置は、ゴールアンカーのローカル空間で、Xが Goal Twist Axis 、Yが Goal Out Axis 、Zが Goal Up Axis です。
Use Previous Target
オプションでタイムステップの開始におけるモーターターゲットを指定します。 ソルバは、モーターターゲットがアニメーションしている時により正確な挙動をするようにサブステップ毎にモーターターゲットを補間します。
Initial Target Rotation
タイムステップの開始における Target Rotation を指定します。
Initial Target Position
タイムステップの開始における Target Position を指定します。
Ignore Mass
この拘束の Max Impulse が設定されている時にオブジェクトの質量を無視します。 これによって、異なるオブジェクトの組み合わせに対して同様の強度でモーターをセットアップしやすくなります。
Max Impulse
Motor Target を達成するために拘束ソルバが適用可能な最大Impulse(力積)を指定します。 値が大きいほど、モーターが強くなります。
Correction Time
拘束が Motor Target からの乖離の訂正を試みる頻度を指定します。
Constraint Force Mixing
この値を上げると、拘束のモーターコンポーネントがより柔らかくなります。 プラスの小さい値ほど、シミュレーションの安定性を良くすることができます。
Target Angular Stiffness
モーターのターゲット方向に合わせようとするフォースの強さを指定します。
この値は、バネの周波数に相当します。
Target Angular Damping Ratio
モーターのターゲット方向に合わせる時にモーションに適用される減衰量を指定します。 0の値は、減衰なしが指定され、1の値は、振動しないほど十分な減衰量が指定されます。 0から1の間の値は、(ある程度の減衰がある)振動が許容され、1より大きい値は、振動しないようにモーションが大幅に減衰します。
この値は、バネの減衰率に相当します。
Target Position Stiffness
モーターのターゲット位置に合わせようとするフォースの強さを指定します。
この値は、バネの周波数に相当します。
Target Position Damping Ratio
モーターのターゲット位置に合わせる時にモーションに適用される減衰量を指定します。 0の値は、減衰なしが指定され、1の値は、振動しないほど十分な減衰量が指定されます。 0から1の間の値は、(ある程度の減衰がある)振動が許容され、1より大きい値は、振動しないようにモーションが大幅に減衰します。
この値は、バネの減衰率に相当します。
Use VEXpressions
VEXエクスプレッションを使用して、拘束アトリビュートを修正します。
Examples ¶
ConeTwist Example for RBD Cone Twist Constraint Properties geometry node
このサンプルでは、Cone Twist Constraint Properties SOPを使用して、機械式のBullet Cone Twist拘束のセットアップ方法を説明しています。
| See also |