| On this page |
概要 ¶
Topo Flowは、![]() Topo Transferノードの
リトポロジー
ワークフローを、テクスチャの位置合わせを使用したスキャンジオメトリの4D処理まで拡張します。
Topo Transferノードを使用して中間参照スキャンからテンプレートメッシュを作成した後に、Topo Flowノードを使用して、関連付けられたスキャンからさらにポーズをキャプチャします。
Topo Flowプロセスでは、
オプティカルフロー
を使用して、テンプレートメッシュを変形させながらテクスチャの位置合わせを維持して、ポーズの形状をキャプチャします。
Topo Transferノードの
リトポロジー
ワークフローを、テクスチャの位置合わせを使用したスキャンジオメトリの4D処理まで拡張します。
Topo Transferノードを使用して中間参照スキャンからテンプレートメッシュを作成した後に、Topo Flowノードを使用して、関連付けられたスキャンからさらにポーズをキャプチャします。
Topo Flowプロセスでは、
オプティカルフロー
を使用して、テンプレートメッシュを変形させながらテクスチャの位置合わせを維持して、ポーズの形状をキャプチャします。
このオプティカルフローのトラッキングは、Topo Flowノードの入力としてテクスチャマップで指定された拘束ポイントセットに基づいています。
![]() Topo Flow Sampleノードを使用することで、これらのトラッキングサンプルを作成することができます。
通常では、これらのサンプルは、スキャン処理中に被写体に適用しているフェイシャルカーを追跡します。
Topo Flow Sampleノードを使用することで、これらのトラッキングサンプルを作成することができます。
通常では、これらのサンプルは、スキャン処理中に被写体に適用しているフェイシャルカーを追跡します。
![]() Topo Landmarkノードを使用することで、フィッティングのガイドに役立つランドマーク拘束を追加で指定することができます。
4D処理の場合、これらのランドマークは、一般的にはオプティカルフローでは上手く追跡されない目や唇の周辺の顔の領域を拘束します。
Topo Landmarkノードを使用することで、フィッティングのガイドに役立つランドマーク拘束を追加で指定することができます。
4D処理の場合、これらのランドマークは、一般的にはオプティカルフローでは上手く追跡されない目や唇の周辺の顔の領域を拘束します。
このノードは、Rigid(変形しない)プリミティブ/ポイントを指定するための拘束、Topo Transferと同じ方法で追加のジオメトリコンポーネントとの一対一の関係を維持するための拘束をサポートしています。
Topo Flowには、テクスチャマップ付きのニュートラルポーズスキャンとテクスチャマップ付きのターゲットポーズスキャンが必須です(Referencesタブを参照)。 このデータは、オプティカルフロープロセス向けに合わせられたマップを作成します。
拘束とサンプルをセットアップした後、そのポーズのポーズスキャン情報と追加したランドマークを更新して、一連のポーズを処理します。 Optical Flowパラメータを設定することで、特定のポーズの結果を調整することができます。
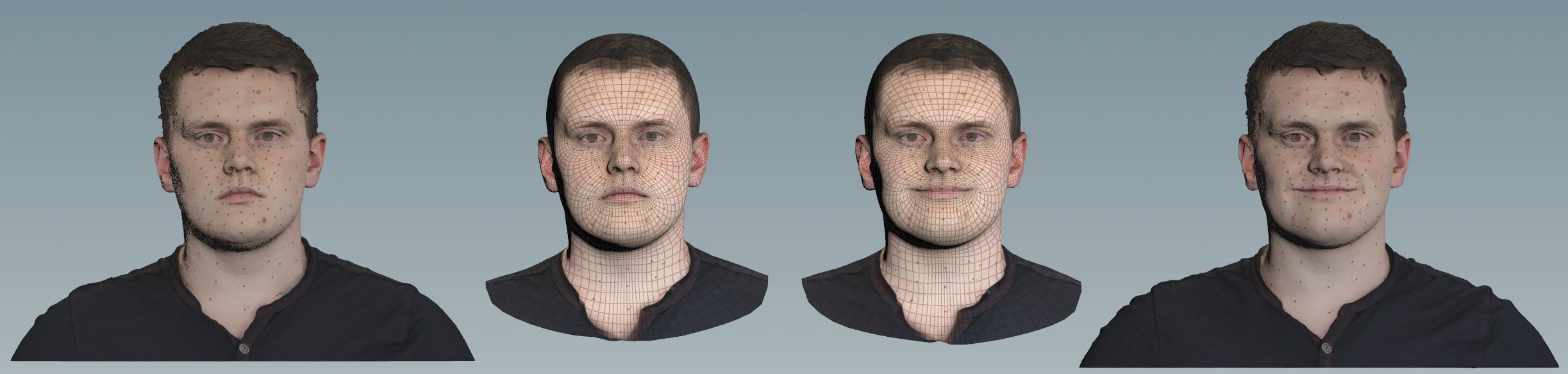
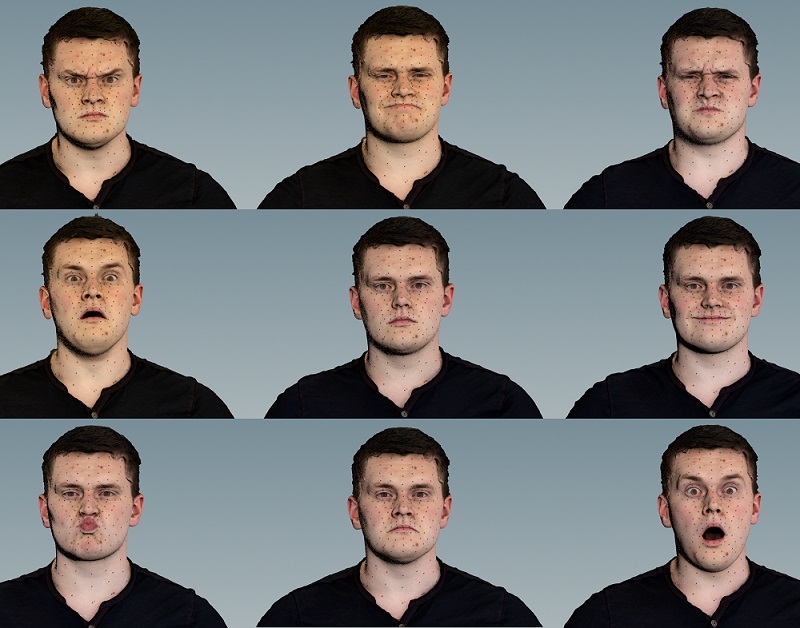
正しいテクスチャの位置合わせを使用して顔の表情をキャプチャするためにTopo Flowノードを使用してテンプレートメッシュを一連のスキャンにフィットさせる方法を説明したシーンファイルがコンテンツライブラリに公開されています。 以下に、Topo Flowスキャン(左)とその結果(右)の例を載せています。

入力 ¶
Template Mesh
このノードの1番目の入力に接続する時、ここには、参照スキャンデータに位置合わせされるテンプレートメッシュを接続します。
Template Texture Constraints
このノードの2番目の入力に接続する時、ここには、オプティカルフロートラッキングに使用されるテクスチャマップ内のサンプルポイントを接続します。
Template Mesh Landmarks
このノードの3番目の入力に接続する時、ここには、参照ランドマークとして使用するオプションのポイントを接続します。
Target Mesh Landmarks
このノードの4番目の入力に接続する時、ここには、ターゲットランドマークとして使用するオプションのポイントを接続します。
パラメータ ¶
References ¶
Constraints ¶
Enable Geometry Constraints
セカンダリジオメトリがTopo Flowプロセスに組み込まれるようにするために、拘束を追加します。
Constraint Selection
サポートジオメトリの拘束ソースとして作用するメインジオメトリコンポーネント。
Auto(デフォルト)
このノードは、メインジオメトリコンポーネントを自動的に決定します。
Manual
Constraint Source パラメータを使用して、メインジオメトリコンポーネントを指定します。
Constraint Source
Constraint Selection を Manual に設定した時、ここには、サポートジオメトリの拘束ソースとして作用するメインジオメトリコンポーネントを指定します。
Landmark Attribute
ランドマークラベルを格納する入力上の文字列アトリビュート。
Rigid Primitives
変形プロセスから除外され、代わりに変形プロセスの親となるテンプレートメッシュプリミティブグループ。
Rigid Mask
Mask On に設定すると、ここには、変形結果と親子結果の間のパーセンテージとして各ポイントにリジッドウェイトを適用する Template Mesh 上の Pointアトリビュート を指定します。
Sampling ¶
Resolution Percentage
使用する入力のオリジナル画像(スキャン)解像度の比率。
1未満の値は、その画像解像度を下げます。
このパラメータを1未満の値に設定すると、入力画像のオプティカルフロー処理が高速化され、テクスチャ内に大きな変化がある箇所の精度は良くなり、
小さな変化がある箇所の精度は悪くなります。
例えば、入力の画像解像度が1024 X 1024ピクセルで、このパラメータを0.5に設定すると、その画像解像度は512 X 512ピクセルになります。
デフォルト値は1です。
Alpha Cutoff
テクスチャマップ内のUV島の境界からの減衰量。
値を大きくすると、UV島境界付近の余白が狭くなります。 値を大きくすると、オプティカルフロー処理を高速化することができますが、UV島境界付近のテクスチャフローのトラッキングの精度が悪くなります。
値を小さくすると、UV島境界付近の余白が広くなり、オプティカルフロー処理の速度が遅くなります。
デフォルト値は0.25です。
Optical Flow ¶
Flow Method
テクスチャトラッキングに使用するオプティカルフローメソッド。
Farneback
このメソッドは、モーションの大きな変化をより正確に追跡することができますが、 動きが大きな領域と小さな領域が混在している場合、全体的な結果の精度は悪くなります。
DIS(デフォルト)
Dense Inverse Search (DIS)メソッドの方が高速で精度が良いですが、オーバーシュートになる傾向が高いです。
Search Window Radius
オプティカルフローが特定のピクセル周辺から最良のロケーションをトラッキングする距離を制限する半径(ピクセル)。
値が低いほど、オプティカルフロー処理が高速化され、テクスチャ内の小さな変化に対する精度が良くなります。 通常では、低い値はDISメソッドで上手く動作し、高い値はFarnebackメソッドで上手く動作します。
デフォルト値は8です。
Iterations
テクスチャを位置合わせする時に使用される反復回数。
反復回数が多いほど結果の精度は良くなりますが、クック時間も長くなります。 通常では、Farnebackメソッドには複数の反復回数が必要になり、DISメソッドは1回の反復で動作します。
デフォルト値は1です。
| See also |