| On this page | |
| Since | 20.0 |
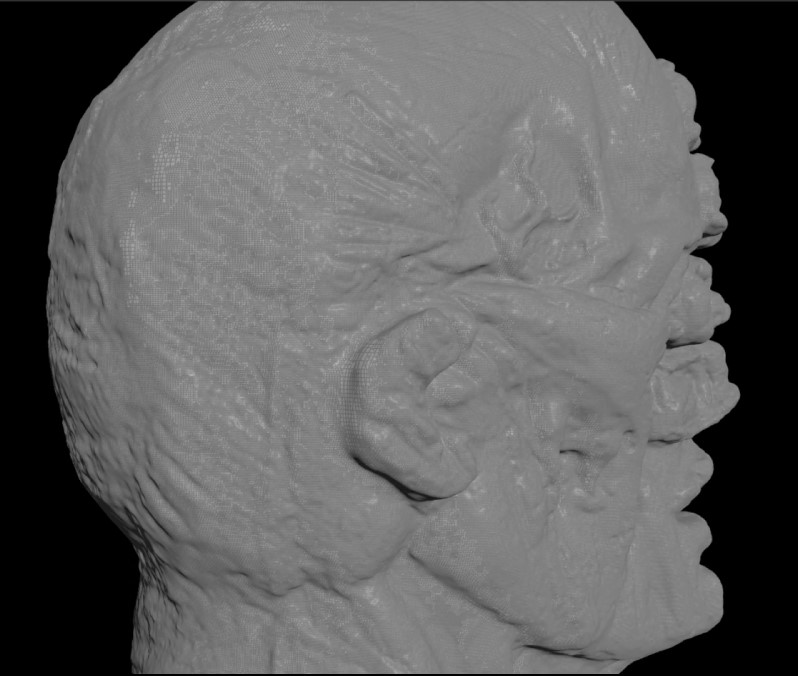
概要 ¶
このノードは、ポイントクラウドをサーフェスメッシュに変換します。
このノードは、レンダリング、シミュレーション、映像やゲームのアセット用にサーフェスに変換する必要があるスキャンジオメトリで使用します。
このノードを使用した後は、![]() Attribute Transferノードを使用することで、入力のPointアトリビュートをそのサーフェス上に転送することができます。
Attribute Transferノードを使用することで、入力のPointアトリビュートをそのサーフェス上に転送することができます。
入力のポイントクラウドには方向が决められた法線がなければなりません。
この法線は、![]() Point Cloud Normalノードを使用して生成することができます。
また、入力のポイントクラウドは、LiDARやフォトグラメトリスキャンなどのサーフェスジオメトリを表現している必要があります。
高密度なパーティクルからサーフェスを構築したいのであれば、
Point Cloud Normalノードを使用して生成することができます。
また、入力のポイントクラウドは、LiDARやフォトグラメトリスキャンなどのサーフェスジオメトリを表現している必要があります。
高密度なパーティクルからサーフェスを構築したいのであれば、![]() Particle Fluid Surfaceノードを使用してください。
Particle Fluid Surfaceノードを使用してください。
How to ¶
サーフェスの再構築の使用例を以下で説明します。
-
シーン内に
 Lidar Importノードを作成します。
Lidar Importノードを作成します。 -
E57 セクション下の Surface Normals を有効にします。
-
ビューポートの右側にあるDisplayツールバー内の
 Display normalsツールを有効にします。
Display normalsツールを有効にします。 -
Point Cloud Surfaceノードを追加して接続します。
パラメータ ¶
Max Subdivisions
サーフェスを推定する時に使用される最大解像度で、ポイントクラウドの境界ボックスの分割数を指定します。
例えば、10の分割数は、1024×1024×1024グリッドで計算することになります。
デフォルト値は8です。
Sample Target
隣接ポイントサンプルの目標数を満たすまで、各ポイントの影響領域を調整します。
値が高いほどノイズのあるサーフェスが滑らかになり、値が低いほどサーフェスが細かくなります。
ノイズの多いポイントクラウドでは、5から15の値が適している場合が多いです。
このパラメータを0に設定するのは推奨しません。
これは、各ポイントの影響領域を Max Subdivisions で指定された解像度に修復するので、局所的に細かいサーフェスを生成することができます。
デフォルト値は2です。
Smoothing Iterations
ポイントクラウドのサーフェスを計算する時に使用されるスムージングの反復回数。
デフォルト値は4です。
Boundary Type
サーフェスを生成する境界タイプ。
Closed(デフォルト)
ポイントクラウドの境界ボックスの内部にサーフェスを閉じます。
Open
ポイントクラウドの境界ボックスの方へサーフェスを広げます。
| See also |