| On this page |
概要 ¶
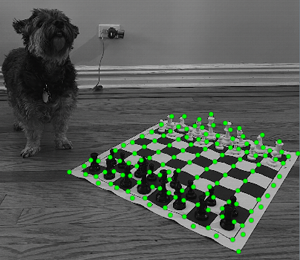
このノードは、画像内の“目立つ”(コントラストが強い)特徴部(例えば、コーナー)を検索します。 この画像が2Dボリュームとして表現され、各ボクセル値にはスカラー(明度)またはベクトル(色)が入っています。
マスク入力を接続することで、検索領域を制限することができます。 マスク入力のボリューム(s)は、1番目の入力のボリューム(s)とまったく同じサイズである必要があります。
How to ¶
| To... | Do this |
|---|---|
画像ファイルを2Dボリュームに変換する |
画像ファイルがあって、それをこのノードで使用するために2Dボリュームに変換する必要がある場合、 OpenEXRなどのマルチ画像フォーマットを取り込むと、このFileノードは、各サブ画像/AOVを別々のボリュームに変換します。
このTexture Featureノードの Group フィールドを利用することで、特定のボリューム(例えば、 |
画像内の特徴部を識別する |
|
ビューポート内の特徴部ラベルを無効にする |
このノードが選択された状態で、Handlesツールを選択、または、マウスカーソルをビューポート内に移動して(Enter)を押して、ビューポートの上部に表示されたオペレーションツールバーの Label Features メニューを切り替えることで、識別された特徴部上にラベルを表示するかどうか制御することができます。 |

パラメータ ¶
Group
1番目の入力から使用するボリュームプリミティブのリスト。 ここを空っぽのままにすると、このノードは、その入力内のすべてのボリュームを使用します。
Maximum Feature Count
検索する特徴点の最大数。
Minimum Spacing
特徴点の間を維持する最小距離(ボクセル数)。
Quality Tolerance
“目立つ”(コントラストが強い)特徴部を出力内に出現させる量を制御します。 この数値を下げると、特徴部が少なくなって目立つようになります。 この数値を上げると、特徴部が増えて目立たなくなります。
Blur Radius
この数を上げると、特徴部を検索する前に入力画像にもっとブラーがかかります。 ノイズの多い画像では、これを上げることで“誤判定”を軽減することができます。 過度にぼやけた画像では、これを下げることで特徴部が識別しやすくなります。
Gradient Radius
この数を上げると、入力画像内の値の変化を計算する際にこのノードが調べる隣接ピクセルの数が増えます。 ノイズの多い画像では、これを上げることで“誤判定”を軽減することができます。 過度にぼやけた画像では、これを下げることで特徴部が識別しやすくなります。
Method
特徴部の採点に使用される評価方法。
Corner Detection
Harris検出アルゴリズムを使用してコーナーポイントを見つけます。
Minimum Eigen Value
ローカル分散共分散行列からの固有値を使用してコーナーポイントを見つけます。
Corner Weight
Method が Corner Detection の時、これは、一目瞭然なコーナー(異なる値の領域がぶつかるポイント)に与えるウェイト量を制御します。
Output
“特徴部”を疎ボリューム内のボクセルまたは3Dポイントのどちらで出力するのか指定します。
Output Name
Output が Volume の時、これがボリューム名として使用されます。
入力 ¶
Volume Image
特徴部が解析される2次元ボリューム。
Volume Mask
オプション。 このボリューム内のゼロでない値のボクセルに呼応する1番目の入力ボリューム内の特徴部のみを検索します。 これら2つのボリュームは同じサイズでなければなりません。
Examples ¶
TextureFeatureBasicExample Example for Texture Feature geometry node
このサンプルでは、いくつかの画像データを通してTexture Featureノードの使い方を説明しています。
| See also |